




















1.Introduction ad AC Drives (variabilis Frequency Drives) In regno modernae industrialis imperium an .......
READ MORE
Home / News / Industria News / AC Servo Motor Explicatur: Quomodo Operatur, Genera, et Quomodo Eligendi Iustum?
AC Servo Motor Explicatur: Quomodo Operatur, Genera, et Quomodo Eligendi Iustum?
What Is an AC Servo Motor?
AC servo motore genus est motoris electrici qui in alterno currente currit et designatus est ut accuratam potestatem in positione, velocitate et torque praebeat. Dissimilis a regulari AC motorio qui modo ad certam celeritatem deducit, motor servo continuo opiniones accipit ab encoder adnexo stipite. Commentatio illa systema exacte narrat ubi motor quovis momento est, sinit eam correctiones reales facere ac scopum suum locum accuratissime tenere.
Verbum "servo" a verbo Latino pro servo venit - ac per se id quod facit. Mandata fideliter a moderatore sequitur, se aptans continenter ad quodcumque positio, celeritas, vel torquis exigitur. Hoc facit AC servo motores spinarum automationis modernae, CNC machinis, roboticis et omni applicatione ubi certae motus res sunt.
Quod motor AC servo separatum a motore DC servo est potentia fons et constructione. AC servo motores plerumque magis durabiles sunt, sustentationem minus requirunt (nulla perterget ut reponat), et aptiores sunt ad altum celeritatem, summus potentiae ambitus industriae. Solent fere semper una cum servo coegi (etiam servo amplificante appellato) et motus moderatoris ut systema servo-angularum completum compleatur.
Quomodo AC Servo Motor Works
Core principium post AC servo motore clausae opiniones de loop imperium. Ecce prorsus naufragii quomodo systema ab initio ad finem operetur:
- Mandatum input: Motus moderatoris (PLC, CNC moderatoris vel PC) scopum valorem mittit — ut "90 gradus gyrari" vel "nere ad 3,000 RPM" ad servo coegi.
- Servo coegi output: Servus coegi vertit imperium in intentione ac currenti AC moderato, quod motori nutritur.
- Motor motus: Rotor motoris movetur in responsione ad campum electromagneticum ab ambages statorum creatum.
- Encoder feedback: Gyratorius encoder ascendens in hastili motorio continue mensurat statum et velocitatem actualem, data hac remittit ad coegi servo.
- Error correctionis: Coactio actualem statum imperatae positioni comparat et statim output ad omnem differentiam tollendam accommodat (vocatur "error").
Haec ansa centies vel milies in secundo currit, unde servo systemata tam arcta tolerantiae consequi potest. Encoder pars critica est - motores plerique moderni AC servo motores altae resolutionis invigilant cum solutione duodeviginti vel 23 frenum, significationes deprehendere possunt decies centena millia distinctarum positionum per revolutionem.
Genera AC Servo Motors
AC servo motorum in industria hodie adhibentur duo genera principalia, singula cum diversis principiis operantibus et usu ideali casuum.
Synchroni AC Servo Motor (PMSM)
Synchroni AC servo motor — magnetes etiam perpetuus motor synchronous (PMSM) — utitur magnetibus permanentibus in rotor immersis. Rotor rotor accuratam synchronizationem cum gyratione campi magnetici in statore deducit. Quia magnetes semper versantur, hoc genus motoris altum torques etiam ad celeritates parvos producit et responsionem dynamicam optimam habet.
Motorum servo synchroni longe frequentissimi generis sunt usus in automationibus industrialibus et applicationibus CNC. Sunt compacta, efficax, et capax ad obtinendum æstimatum Aureum per amplam celeritatem patens. Faces sicut Mitsubishi, Fanuc, Yaskawa, et Siemens omnes motores servo synchrono offerunt ut linea producta primaria.
Induction AC Servo Motor (Asynchronous)
Inductio servo motore utitur rotor sciuro-cavea ubi vena inducitur per campum magneticum circumactum — magnetes permanentes non sunt. Rotor semper paulo post campum stator (hoc "slabe" dicitur, quod torques quomodo generatur. Cum paribus cum vector-control servo coegi, inductio motorum etiam bonam celeritatem et imperium torques consequi potest, quamquam typice non tam certae vel responsivae pro synchronis generibus.
Inductio servo motorum saepe eliguntur ad applicationes fusi altae, ut CNC machinae fusi millingae, in quibus summae celeritatis et asperitatis plus refert quam positio ultra definita. Etiam minus pretiosae sunt in majori potestate aestimandi.
Key Specificationes debes intelligere
Priusquam eligendum vel operandum cum aliquo motore AC servo, necesse est ut nucleum spectrum in schedula inspicias. Hic apertus est naufragii linguarum parametri maximi momenti:
| Specification | Quid est? | Quid refert |
| Ratum Torque (N·m) | Continua Aureus motricium potest producere ad celeritatem rated | Excedere debet onus Aureus inter frictionem et inertiam |
| Peak Torque (N·m) | Maximum torque pro brevi erumpit (typice 2-3 'aestimavit) | Opus accelerationis et retardationis gradus |
| Rated Speed (RPM) | Normalis operating celeritate ad rated torque | Decernit si motricium motui tuo conveniens profile |
| Rated Power (W or kW) | Output mechanica potentia (Aureus celeritas) | Ad aequare coegi ac magnitudine retinacula / praevaricatores |
| Encoder Resolution | Numerus pulsuum vel frenorum per revolutionem | Superiore constantia = meliore loco imperium |
| Rotor Inertia (kg·cm²) | Resistentia rotoris ad mutationes in velocitate gyratorio | Adaequari debet cum onus inertiae pro stabili potestate |
| IP Rating | Praesidium planum in pulvere et aqua ingressu | Critica pro dura vel humida ambitibus |
AC Servo Motor vs Stepper Motor: Quod uteris?
Una e communissimis quaestionibus quae in motu sunt potestate est utrum AC servo motore utatur an motore stepper. Utrumque imperium potest regere, sed multum aliter operari et diversis applicationibus congruere.
Stepper movens in certis incrementis (gradibus) movet et open-loop operatur - significationem non esse encoder feedback in maxime fundamentalibus setups. Simplex, vilis, et bene operatur ad levia onera, modicis velocitatibus. Attamen gradarii vestigia sub onerare condicionibus sine aliqua sui correctione carere possunt, et in superioribus velocitatibus torquem significantes amittunt.
AC servo motore, at contra, semper exacte novit ubi de encoder agitur. Locum sub onere non amittet, iussa citius respondet, et torques plenos per amplum celeritatem obtinet. Commercium est sumptus et multiplicitas - systematis servo (cabulae motricium tuning) significanter plus quam stepperum instar quantitatis aequivalentis constat.
Hic regula simplex pollicis est: stepper pro simplici, humili onere, humili velocitate positus ubi sumptus criticus est. AC servo motore utere cum summa celeritate opus est, torque magno, mutationes onus dynamicae, vel cum loco accuratio non negotiabilis est.

Communia Applications AC Servo Motors
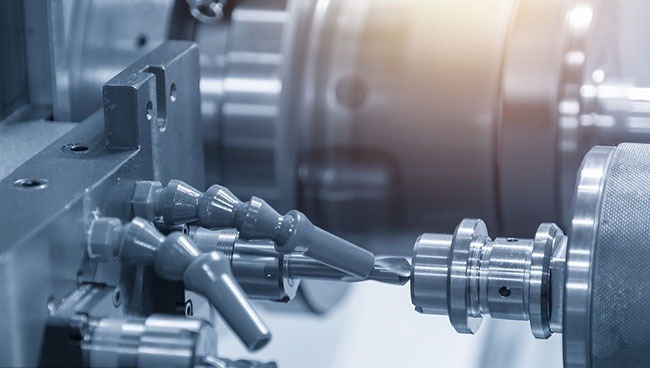
AC servo motores in omni fere industria monstrant ubi motus moderatus requiritur. Quaedam applicationes maxime communes includunt:
- CNC Machining Centra: Servo motores securibus X, Y, Z depellunt machinas et lesta molendi, nec non fusum in quibusdam configurationibus. Permittunt machinae figuras complexas cum accurate micron-gradu secare.
- Robots industriae: Quaelibet iunctura brachii roboti 6-axis proprie a motore servo suo impellitur. Coordinata moderatio omnium articulorum fluidum, certum motum per vias implicatas permittit.
- Machinis Packaging: Servi motores moderantur indexing, secandi, obsignandi, implendi operationes in linearum sarcinarum summa celeritate, ubi iterabilitas et celeritas necessaria sunt.
- Vestibulum semconductor: Azyma tractatio, rationum pick et locus, et inspectio instrumenti nituntur motoribus servo pro nanometris gradu positionis repeatabilium.
- Typographia et Conversio: Subcriptio imperium in torcularibus typographicis ac tensionis temperamentum in systematibus interretialibus tractandis pendent a motoribus servo ad conservandum constantem materiam cibandi.
- Medical Equipment: CT scanners, robots chirurgicos, et infusio soleatus parvis et exquisitis motoribus servo utuntur ad operationem tutam, accuratam.
Quam eligere ius AC Servo Motor
AC servo motore ius eligendo descendit ut facultates motoris diligenter adaptans ad applicationem postulata tua. Hic gradus additus ducit ad systema underpowered aut in agro qui deficit in solutione overpriced overpriced. Sequere hos gradus:
Gradus I - Definire tuum Lond Requirements
Primum computando torquem onus, quod includit vim vel pondus motus, friction, et quaevis transmissio mechanica (gearbox, balteus, ballscrew). Etiam onus inertiae computa — hoc tibi narrat quantam industriam motor praebere debeat ad accelerandum onus. Communis industriae ratio est ut inertiae motoris ratio infra 10:1 pro bono stabilitatis moderamine, et speciatim 3:1 vel minus pro applicationibus dynamicis summus.
Gradus II - Definire tuum Motus Profile
Adumbrare celeritatem vs. temporis graphi pro motu cycli tuo. Nota apicem celeritatis requiri, accelerationem et retardationem temporum, et officium cycli (quousque motor continuo vs. Hoc determinat tum torques apicem necessarii (per accelerationem) et torquem RMS (radix media quadrata) quae sub motoris aestimavit continuum torquem manere debet ut overheating evitet.
Gradus III - Select Motor Frame et Power Rating
Cum scis torques tuos et velocitatem requisita, motorem elige cum bracteis aestimatis et velocitate aestimata, quae necessitates tuas cum margine aliquo commode operit (typice 20-30%). Confirma etiam magnitudo corporis corporis aptat ad spatium ascendendum - motores servi plerumque praesto sunt in magnitudinibus ab 40 mm usque ad 200mm vel amplioribus.
Gradus IV - par Servo Coegi
Servus coegi debet aequari intentioni, currenti et encoder speciei motoris. Plurimi artifices vendunt compositio motoris-coegiae (exampla series, Yaskawa Sigma, series Mitsubishi MR-J, series Siemens S-1FK) quae simplificat. Si faces miscens, compatibilitatem trans intentionem rating diligenter comprobat, protocollum encoder (incrementale, absolutum, EnDat, BiSS-C, etc.), et moderatio interfaciei (pulsu/directionis, analogi ±10V, EtherCAT, PROFINET, etc.).
Gradus V - Vide Environmental Conditions
Reprehendo in operating elit. Si motor patebit coolant, pulvis, vel washdowns, opus mobilem IP65 vel IP67 aestimavit. Si in extremis temperaturis operabitur, cognoscere temperatura ambientis motoris eminus. Ad cibum et potum vel medicamenta medicamenta, hastilia ferri immaculata sigilla et speciales tunicas requiri possunt.
Wiring ac Installation Basics
AC servo motore recte instituens tam magna est quam ius eligens. Paucis cardinis commemoro;
- Separate potentiae ac rudentes insignes; Semper iter virtutis motoris funem (U, V, W incrementa) separatim ab encoder cablem feedback. Currens eos in eodem aquaeductu impedimentum causare potest, quod ansam moderandi destabilizet.
- Utere funibus clipeis: Utraque vis funis et funis encoder munitus esse debet, cum scuto in extremo (typice coegi fine) posito ne RAPINA strepitus.
- Humi corporis motor: Motricium habitationem machinae machinae humum coniungi debet ne ictus electrica et emissiones EMI minuat.
- Reprehendo tempus sequentia: U, V, W nexus inter motorem et coegi debent inserere. Si motor in directum malum currit, quaelibet duo periodi fila permuto — numquam permutes fila encoder ut directionem figere.
- Utere resistor dynamic fregit: Motores enim onera verticalia mittentes vel ieiunium cessant requirentes, resistor externus braking connexus energiae regenerativae in retardatione trahit et impedit vitia nimia.
Servo Coegi Tuning: Questus optimus euismod
Post wiring, servo coegi necessitates in luctum esse, ita moderatio ansa recte respondet pro compositione propria motoris oneris. Maxime moderni servo agitant munus auto-tuning includere quod motorem per usitatum experimentum deducit et automatice occasus quaestum meliorem computat. Hoc fere satis est ad regulas applicationes.
Ad postulandas applicationes - sicut summus celeritas vagum et locum vel praecisionem stridor - inveniens manual trium principalium PID quaestus (quaestus locus, lucrum velocitatis et quaestus integralis) requiri possunt. Lucrum auget ratio citius ac rigidior respondendi facit, sed nimis alta et ratio instabilis fit et oscillatur. Finis est responsio sine stipite vel venatione ieiunium consequendum.
Maxime agitet etiam permittit ut incisuras filtras ad incisuras frequentias resonantium mechanicas supprimendas, quaestus pascendi ut accurationem in acceleratione tracking emendare, et compensatio frictioni ad errorem situm in velocitatibus humilibus reducere. Sumens tempus ut has unctiones apte concinere possit notabilem differentiam facere in finali positione accurationis et throughput machinae.
Sustentationem et Troubleshooting Tips
AC servo motores plerumque certissimi sunt quia nullam setam aut commutatorem ad defatigatum habent. Sed aliqua sustentatio adhuc necessaria est supra tempus;
- Ferens repositum: Motrices gestus sunt frequentissima item lapsum. Plerique artifices nominant tortorem intervalla e horis operantibus sustinentes — singulas fere 20000 ad 30.000 horas. Nimia tremor seu strepitus est mane signum gerendi induendi.
- Encoder inspectionem fune: Funes encoder saepe saepe flectuntur (praesertim in armis robotis vel systematibus gantariis) et per tempus internum rumpit evolvere possunt. Servus si erraticam positionem vel vitia monstrare incipit, primum funem encoder suspicabitur.
- Overheating checks: Si motor incaluerit, cognoscere officium cycli intra spec, temperatura ambientem gratum esse, et superficies motoria munda esse et non impedita. Sustentatus aestuans curvis velit et vitam motricium minuit.
- Coegi terrorem codes: Cum culpa incidit, semper legitur signum terroris e servo activitatis ostentationis vel programmatis. Codices communes includunt excessum, excessum, excessum, errorem encoder, onerare, situm excessus excessus. Quaeque tibi directa sunt ad radicem causae.
Servans sextarium conservationis motoris horae cursus, historiae terroris, et quaevis inspectiones physicae longam viam ad praenuntianda delicta pergit, antequam tempus temporis inconditum causant.
Prior Post
Nullus prior articulum
Proxima Post
Medium-Voltage Variabilis Frequency Coegi Explicata: Quomodo operatur, Quod Acta eligere, et quid specificare
Copyright 2024 Fujian Raynen Technology Co.,Ltd. All Rights Reserved.
Privacy Policy  Motor Control Nulla
Motor Control Nulla