





















1.Introduction ad AC Drives (variabilis Frequency Drives) In regno modernae industrialis imperium an .......
READ MORE
Home / News / Industria News / The Guide to Industrial Servo Motors: How they work and why They Matter?
The Guide to Industrial Servo Motors: How they work and why They Matter?
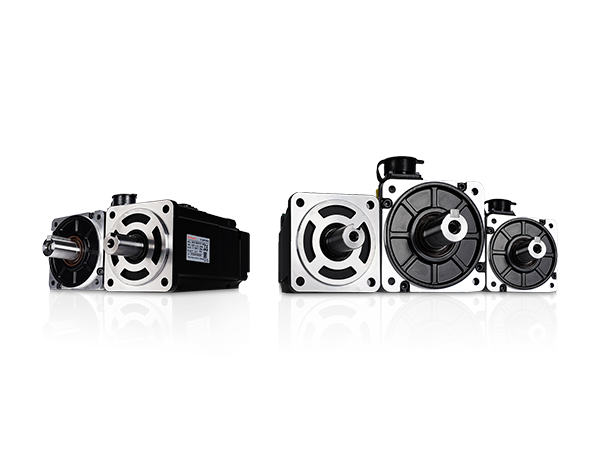
What Is an Industrial Servo Motor and How does It Work?
Motricium servo industrialis est praecisio motus machinae in fabricandis, roboticis et machinationibus automated late adhibitis. Dissimile vexillum motori quod ad certam celeritatem simpliciter deducit, servo motore in ratio clauso-lope agit — significat constanter suam dignitatem, velocitatem et torquem monitorem, tunc temporis realis adcommodat ut valoribus imperatis compositus. Mores huius feedback agitatae sunt quae motores servolos quos tam certos et diligentes facit in ambitibus industrialibus postulare.
In suo nucleo systema tribus principalibus elementis constat: ipsum motorem, machinam feedback (plerumque encoder vel resolventem), et servo coegi (etiam servo amplificantis vel moderatoris appellatus). Coegi mandata motori emittit, encoder refert quod motor actu agit, et coegi continue declinationem quamlibet emendat. Hoc fasciam centies vel milies secundo accidit, systema arctissimum imperium super motus tradens.
Clavis Components Inside a Servo Motor System
Singulae partes servo systematis motoris cognoscentes adiuvat fabros et technici meliores decisiones de electione, institutione et sollicitudine reddunt. Unaquaeque pars munus peculiare agit in tradendo praecisionem motui systematis destinatum.
Motor
Motor est typice a Brushless AC vel DC motore cum pacto, summo torque consilio. energiam electricam in energiam mechanicam rotativam convertit. Motores servo industriae aedificantur ad accelerationem celerem et retardationem cyclorum sine excalefactione tractandam, utendo summus gradus magneticae materias et inhabitationes scelerisquely efficientes.
De Encoder vel Resolver
Directe in hastile motoriis impositus, encoder verum tempus praebet situm et celeritatem feedback ad coegi. Incrementales encoders pulsus computant ad positionem relativam indagare, cum absoluta encoders positionem exactam sagittae etiam post damnum potentiae renuntiet. Relevatores analogum ad modum encoders sunt et in asperis ambitibus propter earum vetustatem praeferuntur.
Servo Coegi
Servo coegi est cerebrum systematis. Mandata motus accipit a PLC (Programmable Logic Controller) seu motu moderatoris, ea comparat opiniones encoder, et currentem missum motori proinde accommodat. Servo moderno agitet etiam lineamenta in tuto condita, communicationes sociales (sicut EtherCAT vel CANopen), et instrumenta ad optimizing effectus incedit.
AC vs. DC vs. Brushless Servo Motors: Quid interest?
Multa genera motorum servo in uncinis industrialibus utuntur, et unaquaeque commoda sua secundum applicationem habet. Tria genera frequentissima sunt AC motorum servorum, motorum DC servo, ac motorum servo dc servo.
| Type | Potentia Source | Tutela | optimus For |
| AC Servo Motor | AC potestas | Humilis (non perterget) | Summus celeritas, summus potestas machinarum industrialium |
| DC Servo Motor | DC potentia | Superior (perterget gerunt) | Minus sumptus, simpliciores applicationes |
| Brushless DC Servo Motor | DC potentia | Humilis (non perterget) | Foedus, summus praecisio automation |
AC servo motores moderni automationis industriae maxime dominantur propter altitudinem efficientiam, durabilitatem et facultatem servandi constantes torques per amplam celeritatem range. Brushless DC motores servo saepe eliguntur in machinis minoribus vel applicationibus ubi spatium arctatur. Traditional motorum DC servo praestrictus adhuc in instrumento legato reperiuntur, sed in favorem alterius partis obtrectatae augentur.
Ubi Industrial Servo Motorum sunt usus
Industriae servo motores In omnibus fere partibus monstrant motum praecisum, iterabilem. Facultatem ad exigendas positiones celeri responsionis temporibus necessarias reddit per amplum amplitudinem industriarum et machinarum genera.
- CNC Machining Centra: Servo motores axes CNC molendinorum et lestorum pellunt X, Y, Z, ut sub- millimetris accurate in operationibus secandis.
- Robots industriae: Quaelibet iunctura brachii robotici servo dedicato motore utitur ad statum angularem et torquem refrenandum, permittens multiplices axes motus.
- Machinis Packaging: Summus celeritas systemata TRADUCTOR servo agitatae, fillers, et obsignatores constantes efficiunt productum pertractatio et throughput.
- Typographia et Label Machina: Praecisa tensio interretialis ditionis et adnotatione accuratio innititur in systematibus servo motoriis.
- Vestibulum semconductor: Azyma tractatio et lithographia instrumenti accurationem nanometri-gradam postulant, motorum servo nucleum technologiam facit.
- Cibus et Potus Processing: Servo motorum imperium dosing, dividendo, et instrumento dividendo ubi celeritas et constantia critica sunt.
Quam eligere Ius Industrial Servo Motor
Diligens ius servo motori ad applicationem industriae non est solum materia spicae summae aestimatae unitatis in promptu. Machinatores complures technicas parametris aestimare debent ut congruat motoriis et onus mechanici et moderatio postulata machinae.
Torque et Volo Requirements
Primo, cacumen computando, et continuus torques applicationis postulata tua. Considera sarcinam inertiae, frictioni, et quamlibet profiles accelerationem / retardationem. Continuus Aureus motoris rating debet RMS (radix media quadrata) torques officii tui cycli excedere. Solvit nimia pecuniae ratio et auget inertiam; undersizing causas overheating et immatura defectum.
Encoder Resolution
Superior encoder resolutio (metiri in pulsibus per revolutionem vel frenos pro encoders absolutis) translatum est ad meliorem statum imperium. Pro automatione industriae generalis, 17-bit ad 23-bit encoders absoluta communia sunt. Alta praecisio applicationes sicut laganum semiconductorem tractantem vel altiorem resolutionem vel proprias opiniones cogitationes requirere potest.
Environmental Conditions
Considera IP (Ingress Protection) aestimationem motoris. Motor usus in cibo processui plantae ad lavandos-down rationes expositae indiget saltem rating IP67. Motores in ambitibus spumae pulverulentae vel metallicae adiuvant e sigillis scapis obsignatis et connectoribus munitis. Temperatus range operans aliud elementum est - motores vexillum in ambitibus ambientibus altum temperaturas deripere possunt.
Coegi ac Controller Compatibility
Semper verificandum motorem servo compatible cum electo tuo. Aequaliter motore-coegi paria possunt ducere ad pauperes tuning, instabilitatem, vel prorsus defectum. Plurimi artifices majores — ut Siemens, Fanuc, Yaskawa, et Mitsubishi — offerunt iuncturas motrices coegi pares cum parametris optimized parametris directe in activitate conditis.
Intellectus Servo Motor Specifications: A Practical Naufragii
Servi motores schedae primo aspectu terrere possunt. Hic naufragii notionum maximarum convenies et quid re vera in applicatione tua significent.
- Ratum Torque (N·m); Aureus continuus motor sine limitibus scelerisque excedentibus liberare potest. Hoc est nucleus laborat Aureus motoris.
- Peak Torque (N·m); Maximus torque praesto ad brevem diuturnitatem erumpit, in acceleratione typice. Solet 2-3× aureus aestimatus.
- Rated Speed (RPM); Basis velocitas, quam torque aestimavit, in intentione aestimationis traditur. Multi motores servo- rum ad superiores celeritates redactis torques (agro-debilitando) currere possunt.
- Rotor Inertia (kg·m²); Inferior inertia velocius significat responsionem dynamicam. Maximus cum designans ieiunium initium/statur circuitus vel summus frequentia motus perfiles.
- Power Rating (kW or W); Indicat altiore potentia output. Utilis est ad motores comparandas sed numquam debet esse sola norma selecta.
- Insulatio Classis: Maximam temperatura operating velit curvis definit. Classis F (155°C) et Class H (180°C) communia sunt in motoribus servo industrialibus.
Servo Motor Sustentacionem: euismod servans ad suum optimus
Motores industriales plerumque humiles sustentationem motoribus inductionibus traditis comparant, sed liberam sustentationem non sunt. Proactive sustentationem aditus impedit tempus pretiosum et munus motoris significanter vitam extendit.
Attento et Lubrication
Partes sunt frequentissimae gerunt punctum in servo motore. Audi strepitum insolitum in operatione, quae gestationem vel contagium gestantem significare potest. Plurimi servo motores obsignatos gestus qui ad vitam lubricati sunt utuntur, sed in applicationibus summus cyclus vel summus onus, qui reponendarum horarum operativarum exspectatio potius quam defectus ponenda est.
Encoder et Cable Condition
Funis encoder connexoris et feedback vulnerabiles sunt ad vibrationem, flexionem repetitam, et contagium. Inspice funem velit ad crepitum vel abrasionem, et fibulae iungo curandae sunt mundae et plene sedentes. Errores Encoder saepe exhibent positiones erraticae, labes inopinatas, vel mores inconstantes — qui omnes misdiagnos fieri possunt ut quaestiones repellere vel regere.
Cras scelerisque
Most servo agit semita motoris anfractibus temperatus per constructum-in thermistoris. Recognoscere temperatura inclinatio acta periodice. Graduale sursum inclinatio per hebdomades vel menses potest significare quaestionem refrigerationem, mutationem officii cycli, seu degradationis flexuosam. Hoc mature permittit sustentationem cogitationis potius quam subitis substituendi.
Coegi Parameter Tergum
Semper current tergum tuum servo coegi parametri. Cum reponitur coegi vel motor, cum bene tunsa et configuratione data significat operationem in minutis magis quam horis restituere potes. Multi moderni servi actitant subsidium parametri tergum super USB, SD card, seu nexum retis.
Communia problemata cum Industrial Servo Motorum et Quomodo eos figere
Etiam bene conservatae systemata servo motoria interdum quaestiones occurrant. Sciens plerumque culpa genera et radix eorum causat diagnosis et downtime minuit.
| Quaestio | Verisimile causa | Commendatur Actionis |
| Motor oscillat vel venationes | Pauperem PID tuning aut nimium onus inertiae | Re- cantus obitus quaestus; reprehendo inertiae ratio |
| Overheating culpa | Cumulatur officium cyclum aut clausus evacuatione | Review onus profile; clean vel amplio refrigerationem |
| Error aut culpa Encoder | Laedi funem, iungo solutam vel contagione | Inspice funem et iungo; reponere si opus fuerit |
| Nimia tremor | Mechanica misalignment vel senio gestus | Reprehendo copulationem noctis; inspicere gestus |
| Position LUXURIA | C. nimis alta vel motu profile nimium infestantibus | Lucrum proportionale minuere; lenis acceleratio aggeris |
Futurum Industrial Servo Motor Technology
Servo technologiae motoriae pergit celeriter educere progressus in automationi industriae, robotici, et digitalizationis. Plures trends in sequentem generationem systemata servo motoris effingunt.
Systemata servo- rum integrae — ubi electronici electronici directe in corpus motoricum ascenduntur — magis magisque populares fiunt. Hi "motores callidi" multiplicitatem wiring redigunt, excepto arcae spatio, et machinae consilium simpliciorem reddunt. Faces sicut Beckhoff, Bosch Rexroth, et Siemens has lineas productas active explicant et amplificant.
Integratio muneris salus alia maioris progressionis est. Servus modernus nunc agitat incorporare STO (Safe Torque Off), SS1 (Safe Stop 1), et SLS (Safely Limited Speed) functiones directe in ferramenta coegi, necessitatem externae salutis removens in mensas et simplices obsequia cum signis machinis salutis ut ISO 13849 et IEC 62061.
In parte connectivity, Industrialis Interreti Rerum (IIoT) facultates in servo infixae sunt, ut notitias colligationis, diagnostica remotas, et predictive sustentationem efficere possint. Instead of exspectatio culpae fieri, sustentationem teams potest monitor valetudinis metricae motoris - trends temperatura, vibratio signaturas, et onera exemplaria - et schedula interventus antequam defectio fiat. Haec mutatio ex reactiva ad conservationem predictive est una e maximis emendationibus operandis technologiae servo in officinis recentioribus.
Prior Post
Programmabilis Logica Controller: Complete Rector quomodo PLCs Opus, Genera, Programmatio et Electio
Proxima Post
Variable Frequency Drive Explained: How It Works, Where It's Used, and How to Get It Right
Copyright 2024 Fujian Raynen Technology Co.,Ltd. All Rights Reserved.
Privacy Policy  Motor Control Nulla
Motor Control Nulla